Подключение униполярного шагового двигателя NEMA 23 57HM56-2006 к RAMPS 1.4
Перед тем, как начать описывать задачу, я изложу основы управления ШД, которые будут включать необходимый минимум для рассмотрения, описанных в статье способов управления. Рассмотрим необходимый минимум основ управления ШД , необходимый для понимания принципа управления, описанного ниже. А именно:. Способы подключения обмоток, необходимые для осуществления данного режима работы. Полношаговый режим управления при задействовании на один шаг двух фаз.












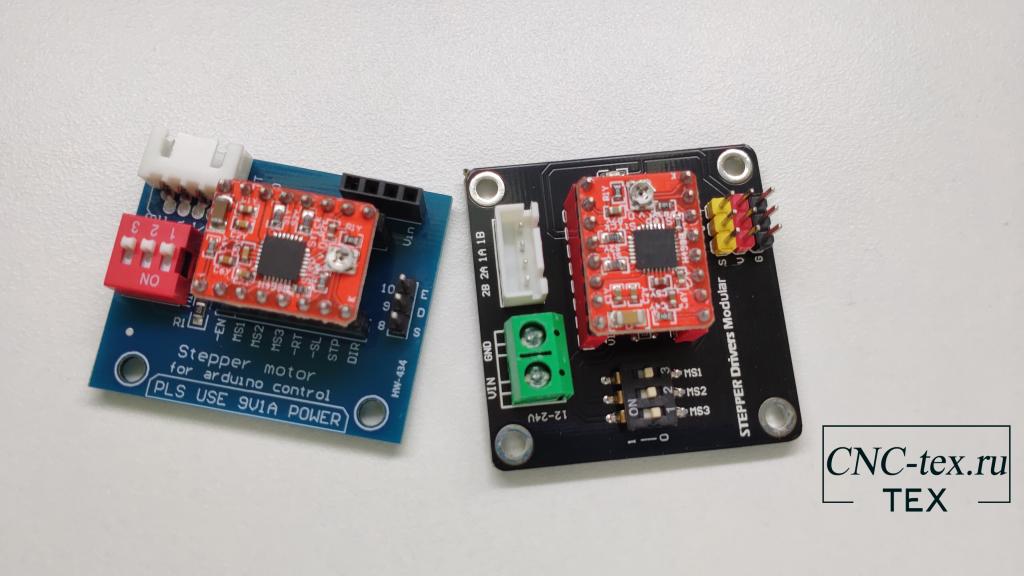
Открываю arduino ide, установил grbl, потыкал в примеры что бы понять как это же работает и собственно ничего не произошло. Моторчик не крутится. Хотя радиатор на драйвере греется. Потыкал примеры базовые, с миганием лампочек, они работают.
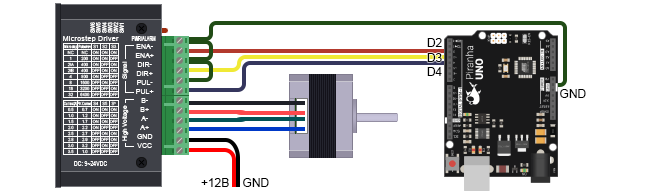
- Подключение шагового двигателя к микроконтроллеру
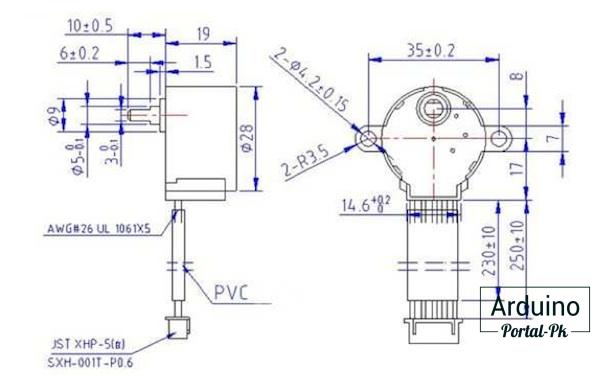
- Шаговый двигатель далее ШД - особая разновидность двигателей, который позволяет точно управлять углом поворота ротора. ШД относится к синхронным безщёточным двигателям, имеет несколько обмоток на статоре 2, 4 или 8 , ротор же выполнен из магнито-мягких способных намагничиваться или магнито-твердых материалов постоянных магнитов и их сочетаний.
- Вам уже приходилось делать выбор между разными шаговыми двигателями для реализации своих амбициозных проектов? Давайте попробуем разобраться какие критерии всё-таки должны учитываться при правильном выборе шагового двигателя.
- Подключение A к Ардуино понадобится во многих проектах, которые «гуляют» по Интернету.
- В формфакторе NEMA 17 нам доступны такие двигатели
- Заказать звонок.
- Если вы хотите создать современного робота, который умеет не только обходить препятствия, двигаться по линии и проходить лабиринты, но также ездить на двух колесах и передавать изображение через интернет, то этот набор для вас. В набор входит книга Михаила Момота « Мобильные роботы на базе ESP32 в среде Arduino IDE », в которой в форме практических проектов для начинающих конструкторов описано создание мобильных роботов на новых высокоскоростных контроллерах ESP
- Поиск Написать публикацию.

")

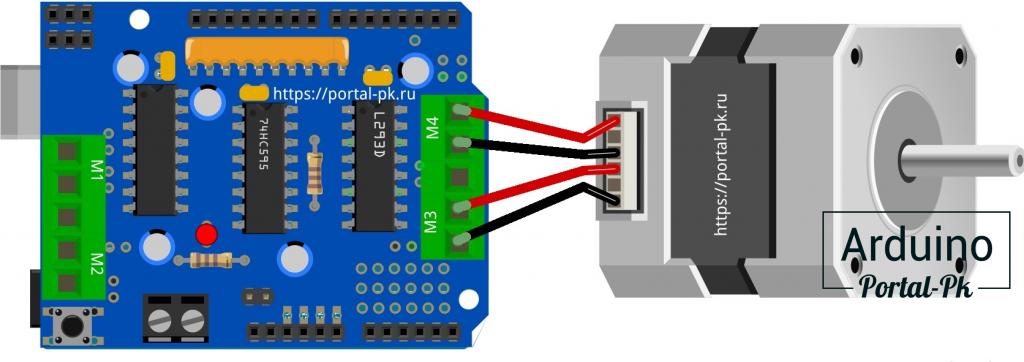



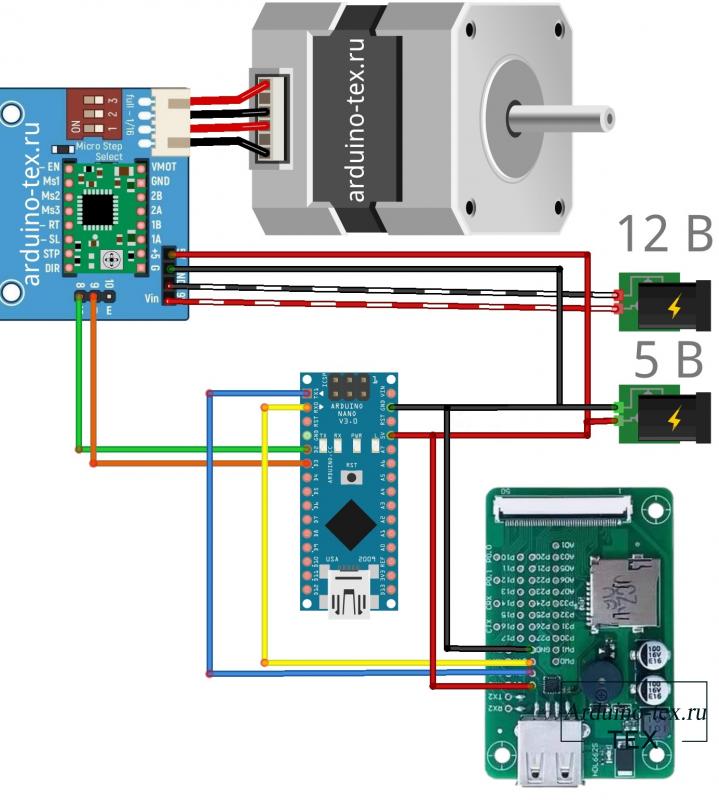
На втором месте рейтинга двигателей для роботов после сервоприводов, которые мы уже рассматривали, стоят шаговые двигатели. Сегодня мы научимся управлять ими при помощи Arduino! Кроме шагового двигателя ШД и Arduino нам потребуется ещё плата драйвера L, которую можно приобрести у нас в магазине. Шаговый двигатель позволяет точно спозиционировать вал, поворачивая его на небольшой угол. Один такой поворот зовётся шаг. Соответственно, одной из важных характеристик привода является количество шагов на оборот, то есть «разрешение» поворота.